Automobile Active Suspension System Control
Project Overview
This project focuses on the mathematical modeling, analysis, and control system design of an automotive active suspension system.
The primary objective is to overcome the inherent trade-off between ride comfort (passenger comfort) and handling stability (road holding) by introducing an active force actuator operating in parallel with passive suspension components.
📄 Full Documentation:
View technical report (Google Drive)
System Configuration and Modeling
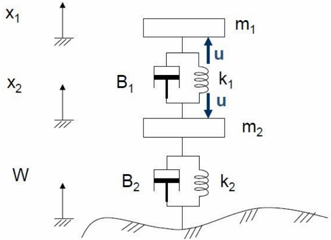
The vehicle dynamics are represented using a two-degree-of-freedom (2-DOF) linear quarter-car model, capturing the essential vertical dynamics of the suspension system.
- Sprung Mass ($m_1$): Represents the vehicle body and passenger load
- Unsprung Mass ($m_2$): Represents the wheel and tire assembly
- Actuator ($u$): Hydraulic or electromagnetic actuator generating control force
- Road Disturbance ($w$): External input representing road irregularities
The equations of motion are derived using Newton’s Second Law and later converted into a state-space representation to enable advanced control design.

Methodology and System Analysis
Before controller synthesis, the system’s fundamental properties were analyzed using MATLAB:
-
Controllability:
The controllability matrix was full rank (Rank = 4), confirming that all system states can be driven by the actuator input. -
Observability:
The observability matrix also achieved Rank = 4, ensuring that all internal states can be reconstructed from measured outputs. -
Open-Loop Stability:
Eigenvalue analysis of the state matrix $A$ showed all eigenvalues with negative real parts, indicating an inherently stable open-loop system.

Control Strategies
Three control approaches were designed and evaluated:
-
State Feedback Controller:
Designed using pole placement, achieving a settling time below 5 seconds. -
Linear Quadratic Regulator (LQR):
Optimized using Bryson’s rule, with weighting matrices
$Q = \mathrm{diag}(10^6, 10^3, 10^4, 10^2)$
to strongly penalize body displacement while limiting actuator effort.
Technical Results and Validation
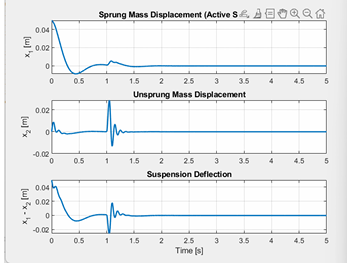
The controlled system was subjected to a 0.1 m step road disturbance.
-
Performance:
Significant reduction in vertical acceleration of the sprung mass, improving ride comfort. -
Settling Behavior:
Both LQR and State Feedback controllers satisfied the 5-second settling time constraint. -
Numerical Simulation:
Time-domain responses were solved using Simulink and a fourth-order Runge–Kutta (RK4) integration scheme.
Summary
This project demonstrates how modern control techniques can be applied to automotive suspension systems to simultaneously improve comfort and handling.
The combination of state-space modeling, optimal control, and numerical simulation provides a robust framework for real-world vehicle dynamics applications.