Multi-DOF Robotic Manipulator Project
📄 Full Project Documentation
You can access the full documentation here.
Project Overview: Multi-DOF Robotic Manipulator
This project presents the complete engineering lifecycle of a multi-degree-of-freedom (Multi-DOF) robotic manipulator, transitioning from mathematical kinematic modeling to a functional physical prototype. The objective was to bridge theoretical robotics with practical application by designing a system capable of precise, real-time motions.
System Configuration and Design
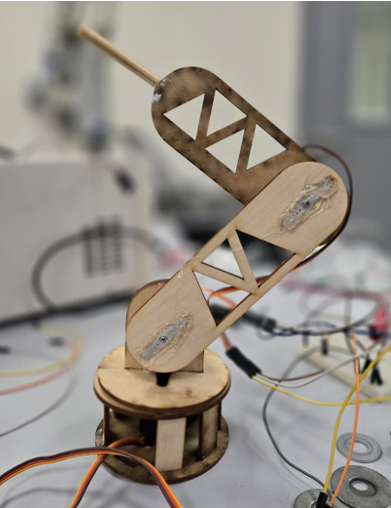
- Manipulator Structure: 3-DOF planar configuration consisting of one base rotation joint, two serial revolute joints, and two rigid links.
- Mechanical Fabrication: Structural components were designed in CAD and fabricated using laser cutting from 3 mm plywood.
- Link Specifications: First link (L_1 = 0.14\,\mathrm{m}), second link (L_2 = 0.12\,\mathrm{m}).
- Control Hardware: Arduino Uno interfaced with three servo motors for joint actuation.
Technical Methodology
- Kinematic Modeling: Denavit–Hartenberg (DH) convention was used to derive homogeneous transformation matrices relating joint variables to the end-effector’s pose.
- Simulation: MATLAB Robotics Toolbox validated the manipulator prior to assembly. Functions like
fkine()andteach()ensured algorithmic correctness. - Verification: Tinkercad was used to pre-validate wiring and motion logic.
Core Mathematical Framework
1. Forward Kinematics (2-DOF Planar)
The end-effector ((x, y)) position based on joint angles (\theta_1) and (\theta_2):
\[\begin{aligned} x &= L_1 \cos(\theta_1) + L_2 \cos(\theta_1 + \theta_2) \\ y &= L_1 \sin(\theta_1) + L_2 \sin(\theta_1 + \theta_2) \end{aligned}\]2. Homogeneous Transformation Matrix
Using the DH convention, the individual transformation matrix for link (i) is:
\[A_i = \text{Rot}_{z, \theta_i} \, \text{Trans}_{z, d_i} \, \text{Trans}_{x, a_i} \, \text{Rot}_{x, \alpha_i}\]3. Inverse Kinematics (3-DOF Geometric Approach)
For a target position ((x, y, z)), the 3D problem reduces to a 2D (k-z) plane.
-
Base Angle: \(\theta_1 = \tan^{-1}\frac{y}{x}\)
-
Elbow Angle ((\theta_3)) using the law of cosines: \(\theta_3 = -\cos^{-1}\frac{x^2 + y^2 + z^2 - L_1^2 - L_2^2}{2 L_1 L_2}\)
-
Shoulder Angle ((\theta_2)): \(\theta_2 = \sin^{-1}\frac{z}{r} + \tan^{-1} \frac{L_1 + L_2 \cos\theta_3}{L_2 \sin\theta_3}, \quad r = \sqrt{x^2 + y^2 + z^2}\)